 When talking about real-time location systems (RTLS) most of the time UWB is considered as the most accurate radio locating system that can scale.
When talking about real-time location systems (RTLS) most of the time UWB is considered as the most accurate radio locating system that can scale.
But where does this accuracy come from?
First of all there is the math and after that there come the tricks.
The math
UWB systems rely on measuring the timepoint of detecting a UWB signal. The things you want to track should emit a short UWB signal regularly and you have to have a network of receivers called anchors that will then log the exact time point when these signals are received. By knowing the timepoints and the locations of your anchors the position can be calculated. However anchors will measure the time with some error and this will affect the calculated position. To minimize the introduced error, the best is to have at least 5 anchors around the located object evenly distributed.
So from the math side, to have an accurate UWB RTLS, you will need
- Anchors installed at geometrically good positions
- Have the anchor positions measured with the maximum possible accuracy
The tricks
As you can see if we install anchors properly the locating accuracy will still be affected by the time measurement error, but luckily there are a number of tricks that can be used to compensate for this. But first let’s see where this error comes from.
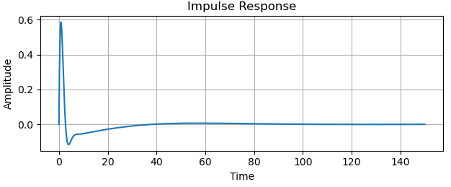
UWB signal is like a bunch of small electromagnetic spikes. So in theory the anchors should detect something like in the figure below. This is more or less true in laboratory circumstances.
However in real environments signals get distorted by going through different materials like the human body or some goods stored on your shelves and also signals get reflected from metallic surfaces. These effects will make the signal detected look like that:
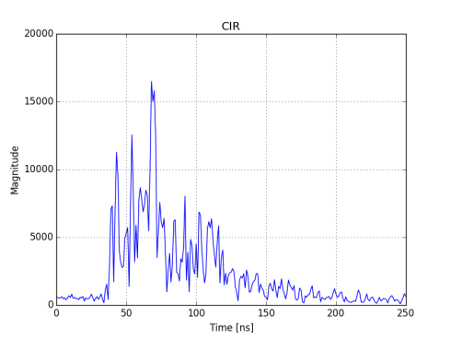 So in real life environments problem will come from how to decide the timepoint when the signal arrive.
So in real life environments problem will come from how to decide the timepoint when the signal arrive.
This is called Leading Edge Detection (LDE) and most of the time the algorithms for this are implemented in the UWB receiver chip. LDE algorithms can be finetuned for the environment to get the best time measurements.
Another problem arises from that it is almost impossible to create two or more anchor devices that measure the time exactly in the same way. Some will have time that is a bit to late others will be in a hurry. This will create a difference in the measured times. This difference is called the time offset between the receivers. Also this difference is not fixed it will increase or decrease over time. This effect is called the time drift between anchors.
So to compensate on time measurement error in anchors, ticks include:
- Finetune the LDE algorithm to your environment
- Calibrate with the continuously measured time offset and drift between UWB anchors
Advanced tricks
Central clock signal
As it was discussed previously the UWB precision is built upon time measurement precision, and each anchor’s measurement is affected by time offset and time drift that have to be calibrated out from the system. What if we could eliminate drift and only care about a constant offset. This is the exact thing that we can achieve if we distribute a single clock’s signal to all anchors via cable. The most precise configuration of the hybrid FloWide RTLS leverages on this foundation. In result
- measurements will be less error prone
- positioning engine will be less complex and more robust
On demand calibration
A precise and scalable locating system built on UWB radio technology will use the Time Difference of Arrival method to calculate position of trackers. To have
Filtering
Adsfasdfasf